1 страниц (6 вхождений)
Кинематика шагающего механизма - Сообщения
#1 Опубликовано: 11.06.2011 05:24:39

Использован геометрический метод расчета,когда положение
узловых точек механизма определяется методом " засечек",
а их скорости и ускорения численным дифференцированием.
https://smath.com/wiki/GetFile.aspx?File=Kinemat.rar
узловых точек механизма определяется методом " засечек",
а их скорости и ускорения численным дифференцированием.
https://smath.com/wiki/GetFile.aspx?File=Kinemat.rar
Метод расчета рычажных механизмов :
http://www.exponenta.ru/educat/systemat/selitskiy-ivanov/index.asp
1 пользователям понравился этот пост
Serg 25.01.2014 12:47:00
#2 Опубликовано: 27.06.2011 03:57:33

А какие должны быть длины шарниров, чтобы машина ходила.
А то она у меня бегает
http://communities.ptc.com/videos/2045
А то она у меня бегает
http://communities.ptc.com/videos/2045
#3 Опубликовано: 27.06.2011 05:09:43
Ссылка:
http://www.scribd.com/doc/31787705/Dynamics-of-Legged-Walking-Mechanism-“Wind-Beast”
В статье расчитаны оптимальные размеры звеньев.
Именно эти размеры и заложены в моей программе
http://www.scribd.com/doc/31787705/Dynamics-of-Legged-Walking-Mechanism-“Wind-Beast”
В статье расчитаны оптимальные размеры звеньев.
Именно эти размеры и заложены в моей программе
Метод расчета рычажных механизмов :
http://www.exponenta.ru/educat/systemat/selitskiy-ivanov/index.asp
#4 Опубликовано: 27.06.2011 07:54:18
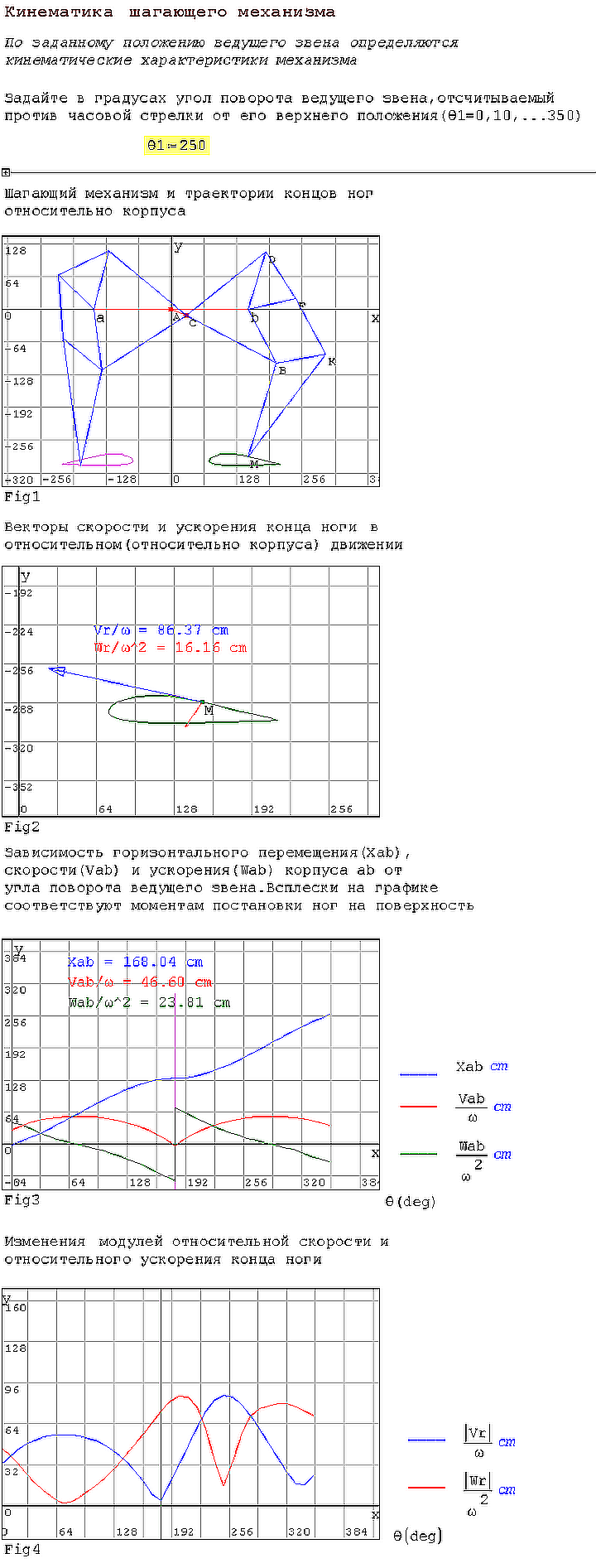
Под оптимальными понимаются такие размеры звеньев,
при которых нижняя часть траектории опорной точки
ноги(Fig.1,Fig.2) мало отличается от прямой.
Движение каждой ноги состоит из двух фаз:
1.Фаза "шарнирного" закрепления на опорной точке
и поворота вокруг нее;
2.Фаза переноса ноги на длину шага.
Оптимальные размеры звеньев позволяютс достаточной
точностью выполнить первую фазу движения.
при которых нижняя часть траектории опорной точки
ноги(Fig.1,Fig.2) мало отличается от прямой.
Движение каждой ноги состоит из двух фаз:
1.Фаза "шарнирного" закрепления на опорной точке
и поворота вокруг нее;
2.Фаза переноса ноги на длину шага.
Оптимальные размеры звеньев позволяютс достаточной
точностью выполнить первую фазу движения.
Метод расчета рычажных механизмов :
http://www.exponenta.ru/educat/systemat/selitskiy-ivanov/index.asp
#5 Опубликовано: 27.06.2011 11:46:00
А приоритет-то наш, российский!
См. машину Чебышева!
См. машину Чебышева!
#6 Опубликовано: 27.06.2011 12:05:56
WroteПод оптимальными понимаются такие размеры звеньев,
при которых нижняя часть траектории опорной точки
ноги(Fig.1,Fig.2) мало отличается от прямой.
Движение каждой ноги состоит из двух фаз:
1.Фаза "шарнирного" закрепления на опорной точке
и поворота вокруг нее;
2.Фаза переноса ноги на длину шага.
Оптимальные размеры звеньев позволяютс достаточной
точностью выполнить первую фазу движения.
Спасибо!
См. http://communities.ptc.com/videos/2047
1 страниц (6 вхождений)
-
 Новые сообщения
Новые сообщения
-
 Нет новых сообщений
Нет новых сообщений